Willkommen zur Formula-Student-Blogreihe!
Formula Student Competition 2018 mit municHMotorsport
Diese Blogreihe ist für alle, die schon immer einen Blick hinter die Kulissen eines selbstständig organisierten studentischen Projekts werfen wollten, bei dem ein Rennfahrzeug im sechsstelligen Bereich ohne jegliche Beaufsichtigung gebaut wird. Und dieses Fahrzeug auch noch autonom auf einer Rennstrecke mit 65km/h navigiert!
Diese Blogreihe rund um die Formula Student Competition 2018 mit municHMotorsport besteht aus drei Teilen:
- Teil 1: Was ist Formula Student Driverless und Anforderungsanalysen?
- Teil 2: Umfelderkennung mit Darknet YOLO
- Teil 3: Modellbasierte Trajektorienplanung
Inhalt
- Formula Student
- Zielspezifikation
- Requirementsanalyse - Recheneinheit
- Requirementsanalyse - Software
- Requirementsanalyse - Sensorik
- Pipeline
- Lessons learned
- ToDos for Season 2019
- Ausblick
Formula Student
Das Formula Student Event ist einer der weltweit größten interdisziplinären studentischen Wettbewerbe, bei dem Teams aus der ganzen Welt mitmachen. Das Ziel ist es, ein Gesamtpaket aus durchdachter Konstruktion, Performance, aber auch einer positiven finanziellen Planung abzuliefern.
Der angesehenste Wettbewerb ist die Formula Student Germany, mit einer Teilnahme von 117 Teams bestehend aus 3650 Studierenden im letzten Jahr. Seit 2017 ist der Wettbewerb in drei Kategorien aufgeteilt. Studierende können einen Verbrenner, ein elektrisches oder ein autonomes Fahrzeug bauen, die jeweils strikte Reglements einhalten müssen, um die Sicherheit des Rennwagens und des Fahrers zu gewährleisten. Vom wochenlangen Event nimmt das sogenannte ‘Scrutineering’, also die technische Abnahme, bis zu vier Tage ein und wird von 250 Sachverständigen durchgeführt.
Nach dem bestandenen Scrutineering darf das Auto an verschiedenen statischen und dynamischen Disziplinen teilnehmen, um möglichst viele Punkte (bis zu 1000) zu sammeln. Die Hauptdisziplin ist das Engineering Design, das 325 Punkte bringt. Dabei wird das Konzept des Autos von Judges aus der Industrie in Frage gestellt. Die Bauteil- oder Subsystemverantwortlichen müssen ihre getroffenen Entscheidungen anhand von Daten und Ausarbeitungen belegen können.
Dadurch wird überprüft, ob eine ingenieurstechnische Herangehensweise eingehalten oder irgendwo gepfuscht wurde. Für den autonomen Wettbewerb gibt es zusätzliche Judges, die sich nur für den autonomen Software Stack interessieren - von der Sensor-Pipeline bis zu den Simulationsverfahren.
Diese drei dynamischen Disziplinen muss das Fahrzeug auf der Strecke durchführen:
- Acceleration - Beschleunigung auf 75m - 75 Punkte
- Skid-Pad - Fahren auf einem Parkour in Form einer liegenden 8 - 75 Punkte
- Track Drive - Zehn Runden auf einem davor unbekannten Parkour von bis zu 500m Länge - 350 Punkte
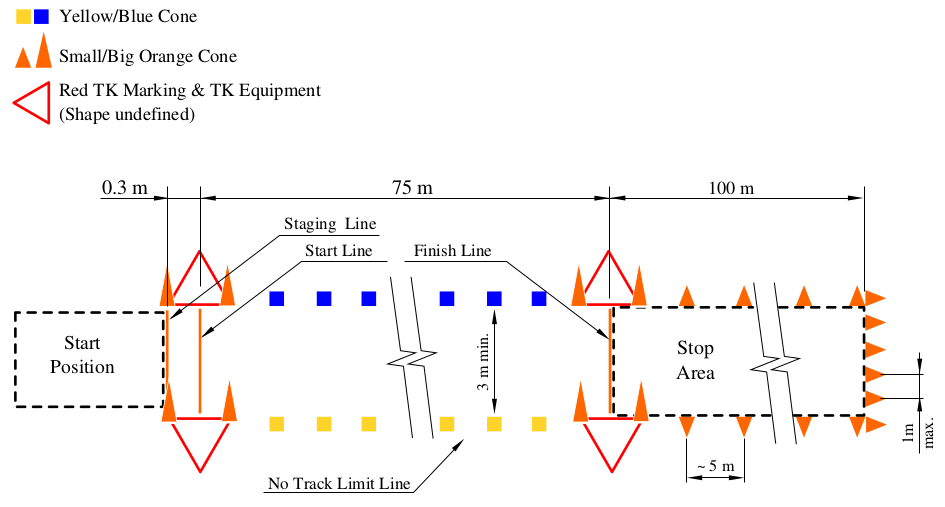
Abbildung 1. Beschleunigungsrennen Piktogramm
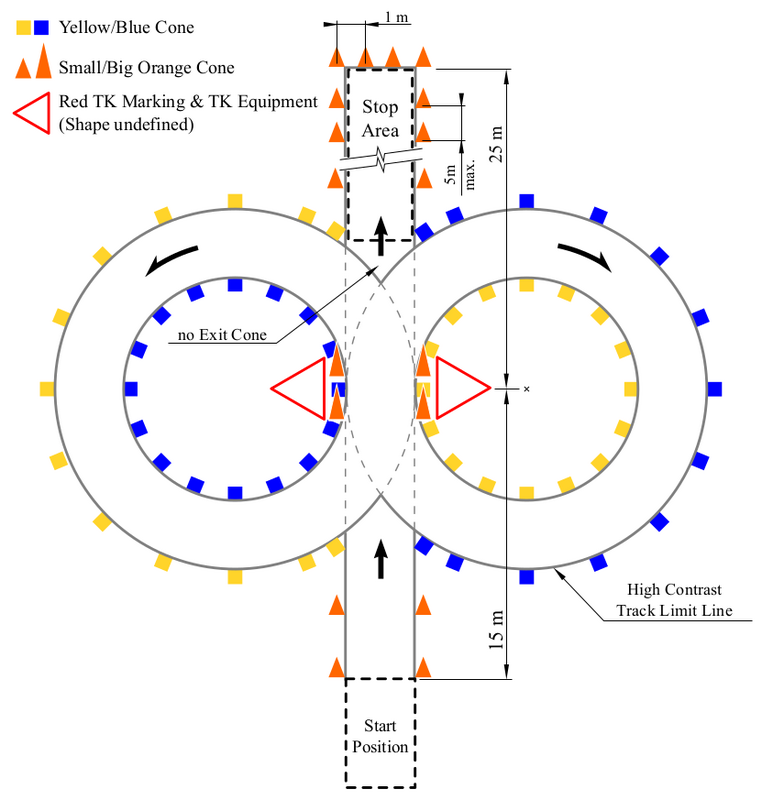
Abbildung 2. Skid-Pad Piktogramm
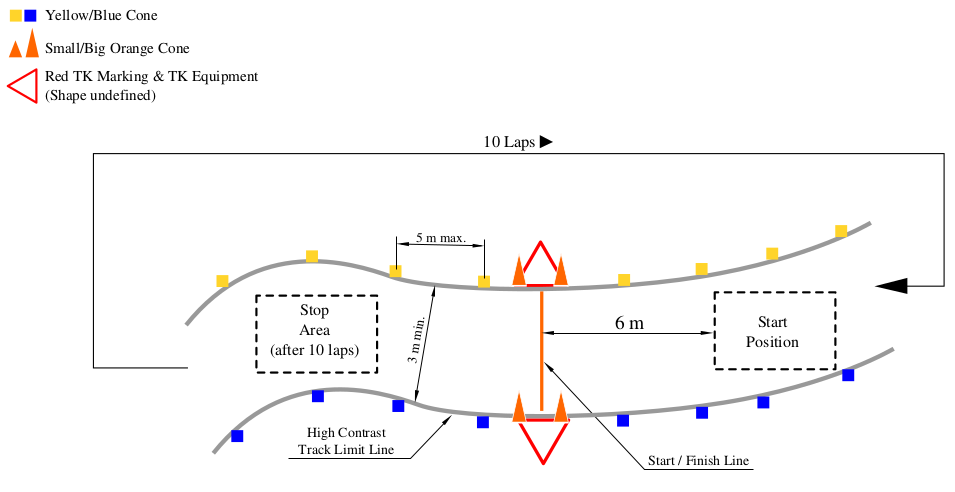
Abbildung 3. Trackdrive Piktogramm
municHMotorsport
municHMotorsport ist ein 2005 gegründeter gemeinnütziger Verein der Hochschule München mit der Absicht, Studierenden eine praxisnahe Ausbildung in großen Projekten zu ermöglichen. Das Ziel des Vereins ist die Forschung an einem weltweit anerkannten Wettbewerb zu fördern und eine Chance zu bieten, das erlernte Wissen umzusetzen. Dafür bauen die Studierenden jedes Jahr ein Fahrzeug von Grund auf - angefangen mit dem Monocoque aus Kohlefaser bis zur Bordelektronik, die im Lenkrad verbaut ist.
Im Jahr 2018 sind wir in allen drei Kategorien angetreten und haben einen Verberenner, ein elektrisches und auch ein autonomes Fahrzeug gebaut.
municHMotorsport bei iteratec
iteratec betreibt seit mehreren Jahren ein Studentenlabor für Machine Learning als Forschungs- und Ausbildungseinheit. Studierende verschiedener Disziplinen wie Mathematik, Physik und Informatik können hier neue Forschungsansätze verproben, in Projekten Erfahrungen im Umgang mit aktuellen Libraries und Technologien sammeln oder Proof of Concepts und Prototypen für Kunden aus Wirtschaft und Forschung erstellen.
Bei einem der Projekte unterstützen drei Studenten von iteratec seit 2017 das Team von municHMotorsport darin, ein autonomes Rennfahrzeug zu entwickeln (siehe Abbildung 4).
Dabei wird das gesammelte Wissen in den Bereichen von Sensor Fusion, Clustering, Computer Vision, Embedded Systeme am Beispiel der Jetson TX2, Projektmanagement und Teamwork akkumuliert und destilliert zurück ins Studentenlabor in Form von Vorträgen und Präsentationen gebracht.
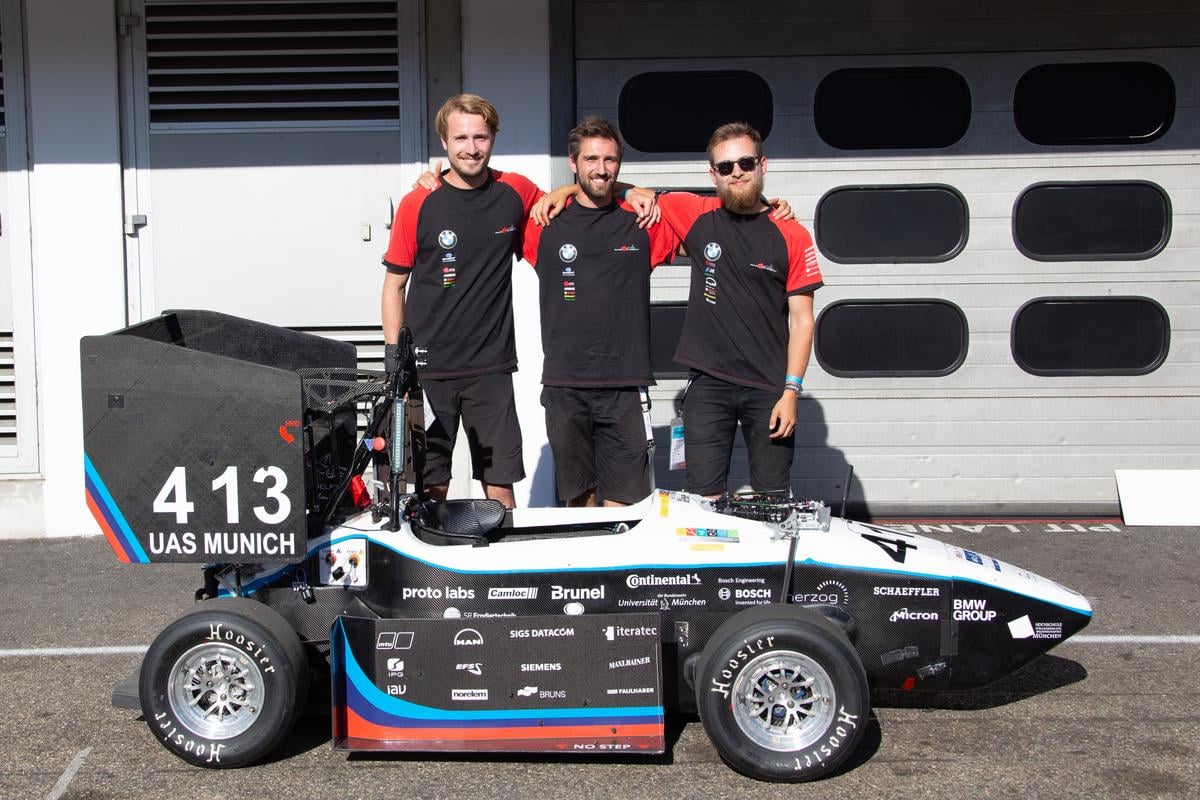

Abbildung 5: Das gesamte municHMotorsport Team der Hochschule München bei der FSG am Hockenheimring
Wie baut man ein autonomes Auto?
Wie baut man ein autonomes Auto? Das ist eine Frage, die man sich nicht unbedingt tagtäglich stellt. Wir wollen deshalb einen kleinen Einblick geben, um den Umfang dieses Projekts zu skizzieren.
Erfahrungen
Noch bevor man in einem Projekt von Requirements reden kann, muss man sich zunächst das Ziel bewusst machen. Unser Ziel im September 2017 war die letzjährige und leider weniger erfolgreiche Season hinter uns zu lassen und eine stabile Basis für die Zukunft vorzubereiten, was die Teilnahme an allen Disziplinen miteinschloss.
Wir wollten unsere Stärken zu dem Zeitpunkt, soweit es geht, ausspielen und uns auf die optischen umgebungserkennenden Sensoren fokussieren, da wir hier Referenzwerte hatten und ungefähr wussten, was machbar ist.
Die erste Entscheidung, die wir getroffen haben, war es, explizit kein LIDAR (ein laserbasierter Umgebungssensor) zu benutzen, da wir einfach nicht die nötige Kernkompetenz dafür im Team hatten. Die Hochschule München hat zum damaligen Zeitpunkt erst begonnen, in ihren Laboren in diese Richtung zu arbeiten und verfügte daher noch über keine Erfahrungen in diesem Bereich.
Mit der Stereolabs ZED Tiefenkamera haben wir in der letzten Season Taktraten von 10-15 FPS erreicht, jedoch mit vielen False-Positives (Objekte die fälschlicherweise als Pylonen erkennt werden, siehe Abbildung 6). Diese entstanden durch die farbbasierte Erkennung, da wir das Bild in HSV kodiert aufteilten und dann nach den jeweils gelben und blauen Anteilen filterten. Das führte bei bereits schwach schwankenden Lichtbedingungen zu Problemen, da die Filter nicht adaptiv waren, sondern per Hand für Wetterverändernungen angepasst werden mussten, um die bestmöglichste Erkennung zu garantieren. Bei starken Lichtveränderungen funktionierte es einfach nicht (siehe Abbildung 7).

Abbildung 6: Ein fälschlicherweise erkannter Schuh als blaue Pylone

Deshalb fokussierten wir uns auf eine monokulare Kamera und die Erkennung der Objekte durch neuronale Netze, da wir im Bereich Machine Learning stärker aufgestellt waren als letztes Jahr und bereits Erfahrung gesammelt hatten.
Als Rechenplattform haben wir die NVIDIA Jetson TX1 mit dem Auvidea Board J120 benutzt, da es im Jahr 2016 die erste zugängliche Embedded-Plattform mit einer GPU war.
Es gab drei grundlegende Entscheidungen zu treffen:
- welche Rechenplattform nutzen wir?
- wie viele von ihnen nutzen wir und falls ja, wie kommunizieren sie miteinander?
- welche und wie viele Umgebungssensoren nutzen wir?
- welche Odometriesensoren nutzen wir?
Und die wichtigste Entscheidung: Wie verknüpfen wir diese Systeme ohne bestehende Softwareblöcke?
Zielspezifikation
Um unser Ziel für die Season zu erreichen, haben wir unsere Kernwerte, die uns durch jede Entscheidung geleitet haben, folgendermaßen definiert:
- Minimalismus
- eine Basis aufbauen und Erfahrung sammeln
- Erweiterbarkeit
- Zuverlässigkeit
- Determinismus
- Nachvollziehbarkeit
- Effizienz
- das Meiste aus den Systemen rausholen
- das Kennen der Grenzen erlaubt eine bessere Argumentation für die Zukunft
Wir haben uns auch explizit gegen Eigenschaften entschieden:
- mehr Sensorik ans Auto zu bringen, um auf Nummer sicher zu gehen
- denn der Nutzen muss erstmal gezeigt werden und die Sensorfusion würde komplizierter
- Abhängigkeit von externen Protokollen und Code
- die Erweiterbarkeit würde dadurch beschränkt
- es ist oft leichter, Tools selber zu programmieren, als sich in schlecht dokumentierte Software einzuarbeiten
Beim Designjudging aus der vorherigen Season kam die fehlende Hardware-Redundanz auf, da im Automotive-Bereich oft mehrere Sensoren und Recheneinheiten die gleiche Aufgabe übernehmen, um ausfallsicher zu sein. Deshalb haben wir angestrebt, dieses Jahr so viele Komponenten wie möglich zu duplizieren.
Requirementsanalyse - Recheneinheit
Nun konnten wir endlich anfangen, Requirements aufzustellen. Zunächst haben wir unsere Recheneinheit festgelegt, um eine ungefähre Vorstellung zu haben, was unsere Hardware leisten kann.
Da wir zum damaligen Zeitpunkt noch nicht wussten, welche Schnittstellen wir brauchen, haben wir die aktuell bekannten genommen und versucht, die typischen Interfaces wie USB 3.0 zu priorisieren, damit die Sensorauswahl so breit wie möglich aufgestellt ist.
Da wir letztes Jahr mit der Jetson TX1 gearbeitet haben, haben wir einen Vergleich mit dessen Neuauflage aufgestellt - der TX2. Wir haben nach viel Recherchearbeit nur dieses Modell als echte Wahl gehabt, da das Preis-Arbeit-Leistungs-Verhältnis unschlagbar war.
Die erste Option war die NVIDIA Drive PX2 mit 250W Verbrauch, was einer sehr hochwertigen Grafikkarte entspricht und die Rechenleistung aufbringt, um ein Tesla Model S/X autonom zu betreiben. Da unsere Aufgabe, durch einen Parkour von Hütchen zu navigieren, wesentlich einfacher ist, haben wir uns dagegen entschieden.
Die zweite Alternative wäre eine FPGA der Firma Xilinx, die eine schnelle Verarbeitung von Bilddaten mit extrem geringen Stromverbrauch ermöglicht. Leider hatten wir da keinerlei Erfahrungswerte und keinen VHDL-Experten (Very High Speed Integrated Circuit Hardware Description Language), der den Arbeitsaufwand abschätzen konnte. Die restlichen Algorithmen, wie SLAM und Trajektorienplanung müssten dann auch auf den Mikrokontroller vom Auto implementiert werden, ohne den Vorteil von General Purpose Processors (übliche programmierbare Prozessoren) zu nutzen.
Somit blieb uns lediglich der Nachfolger, die Jetson TX2, übrig. Die Vergleichskriterien waren übliche Embedded Specs und der Support von:
- CAN Bus - darüber lief unsere Kommunikation mit den Mikrokontrollern
- Ubuntu 16.04 - Auvidea hat eine spezielle gepatchte Version, die auf der Jetson laufen muss
- ROS - Robot Operating System, ein übliches Prototyping Framework für Embedded-Systeme. Viele Sensoren bieten dieses Interface an
| # | Name | Jetson TX1 | Jetson TX2 |
|---|---|---|---|
| 1 | CAN Bus | ||
| 2 | Ubuntu 16.04 | ||
| 3 | ROS Support | ||
| 4 | RAM | 4 GB à 1600Hz with 64Bit DDR4 |
8 GB à 1833Hz with 128Bit DDR4 |
| 5 | CPU | Quad-Core ARM à 1.74GHz |
Quad-Core ARM à 2.0 GHz + NVIDIA Denver Dual-Core à 2.0 GHz |
| 6 | GPU | Maxwell, 256 cores | Pascal, 256 cores |
| 7 | Flash Storage | 12 GB à 200MHz | 32 GB à 200MHz |
| 8 | Wifi | IEEE 802.11ac, single-band | IEEE 802.11a/b/g/n/ac, dual-band |
| 9 | Power (Min/Max-P) | 6.5W - 15W | 7.5W - 15W |
| 10 | Power Input | 5.5V - 19.6V | 5.5V - 19.6V |
Da die TX2 in jeder Hinsicht eine Verbesserung war, haben wir uns dafür entschieden, diese Platform als Hauptrecheneinheit für unsereren Software Stack zu benutzen.
Als schöner Nebeneffekt ergab sich auch die Möglichkeit, die TX2 wegen des geringen Verbrauchs mehrfach einzubauen - falls nötig.
Requirementsanalyse - Software
Nachdem wir nun die NVIDIA Jetson TX2 als Recheneinheit genutzt haben, mussten wir uns überlegen, welche Software und Sensorik wir brauchen, um unser Fahrzeug auf der Strecke zu lokalisieren und gleichzeitig eine Karte davon zu erstellen.
Dafür haben wir uns 7 Konzepte überlegt und diese in 13 Kriterien eingeteilt, um den morphologischen Kasten einsetzen zu können.
Da die gründliche Analyse deutlich den Rahmen von einem schon bereits zu langen Blogeintrag sprengen würde, sind hier die Kriterien und die Konzepte nur kurz aufgelistet. Zu jedem Kriterium wird eine Antwort geschrieben und zusammen im Team die jeweilige relative Gewichtung ausgehandelt.
Unsere Kriterien:
- Brauchen wir Sensorfusion, und falls ja, wie schwer ist sie?
(0,...,5)(Faktor:-2) - Brauchen wir eine Jetson
(true/false)(Faktor:2) - Kann eine Person den Arbeitsaufwand alleine stemmen?
(true/false)(Faktor:5) - Wie sicher wird es funktionieren unter Berücksichtigung dass unbekannten Faktoren?
(0,...,3)(Faktor:-3) - Wie gut kommt es im Judging an?
(-5,...,5)(Faktor:5) - Vollständige Redundanz bezüglich der Funktionalität?
(true/false)(Faktor:5) - Bekannte “Bottlenecks”, wir kennen die potenziellen Verbesserungen
(0,...,5)(Faktor:3) - Völlig neue Technik, die ausführliche Evaluation benötigt
(true/false)(Faktor:-2) - Bekannte Performance-Probleme
(0,..,5)(Faktor:-5) - Konzeptuelle Aufteilung der Verarbeitung von nahen und fernen Objekten
(true/false)(Faktor:2) - Innovationsfaktor
(0,...,5)(Faktor:3) - Redundante Sensorik
(0,..,2)(Faktor:2) - Kann die Arbeit gut aufgeteilt werden
(true/false)(Faktor:5)
Unsere Konzepte, stark zusammengefasst:
- Mono = Monokulare Kamera
- Stereo = Stereokamera
- Darknet = Neuronales Netz Darknet YOLO
- IP = Intrinsische Parameter
- PC = Point Cloud
| Nr | Kamera | Klassifizierung | Distanzschätzung | Bewertung |
|---|---|---|---|---|
| 1 | Mono | Darknet | IP | -0.5 |
| 2 | Stereo | Darknet | PC | -25 |
| 3 | Stereo | Haar Cascades | PC | -7 |
| 4 | Mono + Stereo | Darknet + PC | IP + PC | 33 |
| 5 | Mono | Darknet | ORB-SLAM2 | 11 |
| 6 | 2 x Mono | 2 x Darknet | 2 x IP | 16 |
| 7 | 2 x Mono | Darknet | ORB-SLAM2 | 46 |
Das Problem bei der Auswahl von Konzepten ist es, dass man abschätzen muss, wie gut manche Softwarekomponenten (in unserem Fall ORB-SLAM2 oder g2o) funktionieren werden, bevor wir genügend Zeit investiert haben, um sie ausführlich zu testen.
Wir haben zwar Konzept #7 am höchsten mit 47 Punkten bewertet und ausgewählt, wurden aber von der Performance von ORBSLAM2 enttäuscht, sodass wir auf das drittbeste Konzept #6 umsteigen mussten. Wir hatten uns zu diesem Zeitpunkt schon zu sehr auf Monokameras spezialisiert und bereits die Sensorik-Requirementsanalyse duchgeführt. Daher kamen Stereokameras nicht mehr in Frage. Glücklicherweise hatten wir damit bereits gerechnet und waren nicht am Boden zerstört, als unsere rigorose Planung nicht perfekt aufging.
Mit mehr Zeit und Erfahrung für eine gründlichere Analyse, könnte man sicherlich eine besser fundierte Auswahl treffen.
Ein Problem, das wir bei der Definition dieser Kriterien nicht bedacht hatten, war die starke Kopplung des Mapping-Teils und der Distanzschätzung in den SLAM-Algorithmen.
Wir dachten, dass wir die Distanzschätzung von Objekten als einzelne Funktionalität benutzen und den Rest außen vor lassen könnten. Das war ein grober Fehler, da die Distanzschätzung erstmal nichts mit SLAM zu tun hat, sondern völlig unabhängig davon funktionieren muss. Manche SLAM-Algorithmen können zwar auch mit 2D-Bildern zurechtkommen, aber der sogenannte “Landmark Extraction”-Schritt läuft eigenständig. Er muss dafür sorgen, dass die erkannten Objekte, in eine vergleichbare Form gebracht werden und so mit den Landmarks in der Karte abgeglichen werden können.
In unserem selbst entwickelten SLAM-Algorithmus ist der Unterschied durch ein GMM sehr leicht zu erkennen:
- eine Beobachtung im Bild hat bei uns eine Farbe (gelb, blau oder rot), eine Distanz und einen Winkel relativ zur Fahrzeugposition
- ein Landmark in der Karte ist eine Schätzung von der wahrscheinlichsten Position des Pylons
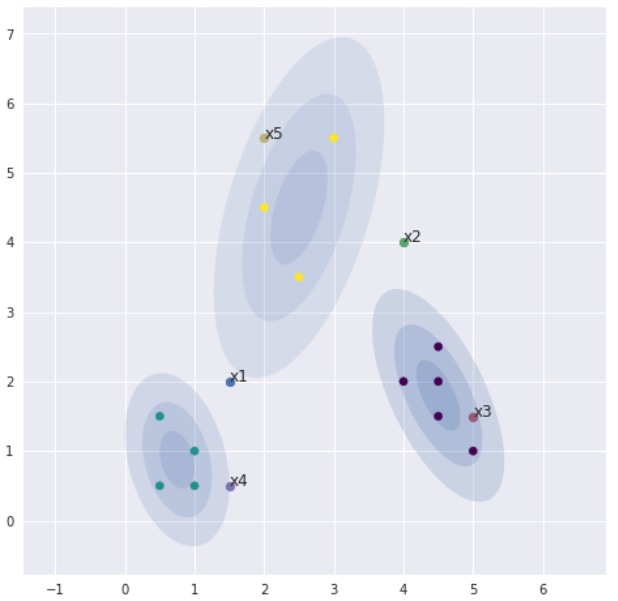
Das türkise Cluster links unten definiert ein Landmark, deren wahrscheinlichste Position irgendwo bei (0.9, 0,9) liegt. Die Ellipsen repräsentieren die Kovarianzen, oder sehr umgangssprachlich die “Wahrscheinlichkeit”, wo sich die wirkliche Position des Objekts befindet. Die Beobachtung x4 hat dagegen keine Wahrscheinlichkeit, sondern nur eine Position (1.5, 0.5).
Eine Ambiguität wäre die Beobachtung x2, da sie sowohl zu dem violetten als auch zu dem gelben Cluster zugeordnet werden kann.
Damit sind wir fertig mit der Software-Requirementsanalyse und können unsere Sensorik genauer spezifizieren.
Requirementsanalyse - Sensorik
Bei der Abnahme des letzjährigen E-Autos waren bereits folgende Sensoren verbaut:
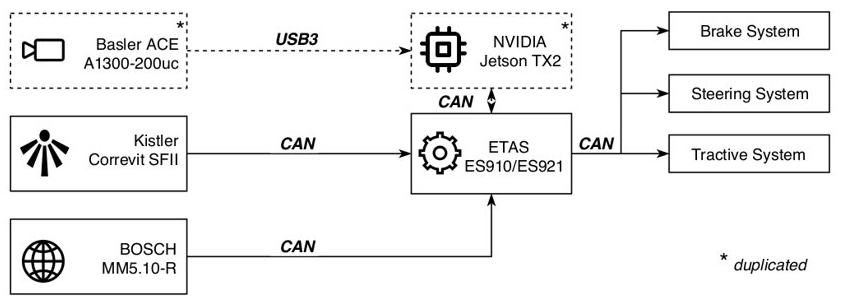
- Kistler Correvit SFII - ein Lichtsensor, der Geschwindigkeit messen kann
- BOSCH MM5.10-R - ein kapazitiver Accelerometer, den wir für die Schätzung des Yaws benutzen
Wir haben beschlossen, diese intrinsischen Sensoren auf die Probe zu stellen, da sie üblicherweise in dem Wettbewerb von der ein oder anderen Firma in jedem Auto verbaut werden. Für den Fall, dass die Sensoren doch nicht genau genug wären, hatten wir uns bereits im Vorhinein Gedanken gemacht, wie wir die Daten replizieren und fusionieren könnten (Raddrehzahl für Geschwindgkeit, Lenkwinkel für Yaw,…).
Die Erfahrungen aus dem letztem Jahr haben uns gezeigt, dass ein DGPS-System nicht immer verlässlich ist und mit geringer Taktrate Daten liefert. Es kommt stark auf das Wetter, die Satellitenpositon und andere Umweltstörfaktoren an, wie gut der Sensor funktioniert. Ganz abgesehen davon handelt es sich um ein 25x7x3cm großes Modul, das nicht einfach in einem Auto unterzubringen ist. Da wir ein minimales Setup fahren wollten, haben wir diesen Sensor lediglich als nachträgliche Verifikationsmethode genommen und ihn per Hand benutzt (siehe Abbildung 9).

Damit kommen wir zur wichtigsten Enscheidung - der Umgebungssensorik.
Zunächst mussten wir unsere Mindesttaktrate bestimmen. Dafür haben wir die Formula Student Rules benutzt, um die Rahmenbedingungen festzulegen. Dieser Teil der Pipeline ist üblicherweise das größte Bottleneck für die Gesamtperformance. Deshalb mussten wir darauf achten, genug Spiel zu lassen, falls Berechnungen und Annahmen nicht ganz aufgehen.
Wir konnten maximal 120km/h fahren mit Pylonen im Maximalabstand von 5m und Minimalabstand von 1m (Erfahrungswert, da kein minimaler Abstand angegeben ist). Um eine geschätzte Position der Pylonen zu erhalten, mussten wir sie mindestens zwei Mal im kürzesten Abstand sehen - das heißt zwei Mal in 1m. Bei 120km/h, oder 33.33m/s braucht man für einen Meter 0.03s. Daraus ergab sich die Taktrate von 33fps.
Realistisch gesehen fährt man aber durchschnittlich 70km/h, da die Strecke kurvenreich ist, was zu einer Taktrate von 19.4fps führte. Deshalb bewegten wir uns mit Puffer im Bereich zwischen 20-30fps, was die minimalen Anforderungen für die Objekterkennung angeht. Je öfter wir die Pylonen sehen, umso besser wird die geschätzte Positon.
Aus dieser Rechnung ergab sich auch die minimale Scharfstelldistanz, die mindestens 1m betragen sollte, da wir sonst gar keine Chance gehabt hätten, die Objekte trotz ausreichender Taktrate zu sehen. Leider spielt aber noch ein anderer Faktor eine Rolle - die Zeit, die das Auto braucht, um auf die neue Umgebung zu reagieren und entsprechend zu lenken. Diese Zeit ist der gesamte Regelweg vom Eingang des Bildes bis die Aktorik das Lenkrad in die gewünschte Position bringt und konnte zum aktuellen Zeitpunkt nur sehr schwer abgeschätzt werden.
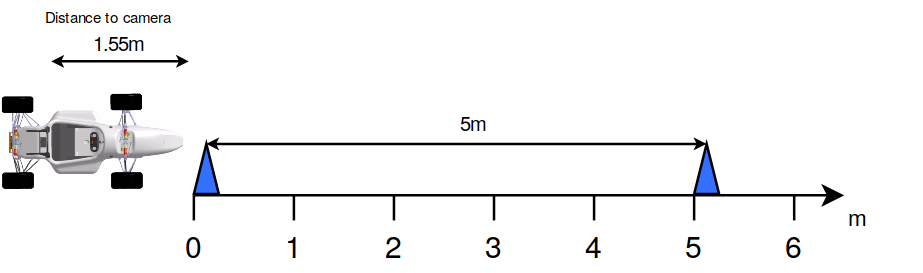
Man kann dennoch argumentieren, dass man die Streckenform besser abschätzen kann, je mehr Pylonen man gleichzeitig sieht. Unsere Mindestanforderung war es, zwei Pylonen der gleichen Farbe zu sehen, um eine Kurve zu erkennen, ohne den vorherigen Zustand zu speichern (bereits gesehene Pylonen, Positionsveränderung der aktuellen Pylonen relativ zum Fahrzeug). Aus der Distanz von der Kamera zur Nase von 1.55m und dem 5m Maximalabstand ergab sich die Scharfstelldistanz von 6.55m.
Der letzte Punkt, den wir hier aber nicht behandeln, war die Auflösung, die mindestens 1280x1024 betragen musste, da 23x23x32cm Pylonen in 10m Entfernung 1cm² groß sind und für viele Objekterkennungsalgorithmen Schwierigkeiten darstellen. Mit einem Objektiv, der Sensorgröße und der Auflösung kann man dieses Requirement feiner festlegen.
Fassen wir zusammen:
- Die Kamera muss hardwaretechnisch in der Lage sein, mindestens
20fpszu liefern - Die Kamera muss von
1.55mbis6.55mscharfstellbar sein - Die Kamera sollte eine kurze Latenz haben, sodass der Zeitpunkt, bis die Daten bei uns ankommen, minimal von dem aktuellen Zeitpunkt abweicht
Zusätzliche Faktoren:
- Muss Global Shutter haben, es ist für hochdynamische Applikationen Pflicht
- USB3.1 ist präferiert, da es ein gängiges Interface und einfach zu handhaben ist
- C-Mount Type ist präferiert, da es hierfür mehr Objektive gibt
- Sollte offizellen Support für die Jetson TX1/TX2 haben, um den Arbeitsaufwand in Grenzen zu halten
Wir haben uns alle Kameras der Firmen FLIR, BASLER, Allied Vision und E-CON Systems nach groben Kriterien gefiltert und haben uns dann für für 11 Kameras entschieden. Die Analyse mit dem morphologischen Kasten brachte uns auf die FLIR Blackfly S. Da sie leider vom Hersteller in Amerika nur auf Anfrage produziert wird, haben wir mehrere Monate gewartet bis die Lieferung sich auf voraussichtlich Mitte Mai verschoben hat. Deshalb mussten wir auf die praktisch identische Kamera acA1300-200uc von Basler ausweichen, die wir glücklicherweise zeitlich gesponsert bekommen haben.
Das gleiche Prozedere sollte auch für das Objektiv passieren, aber da wir im Sponsoring bereits ein auf den ersten Blick sehr passendes Objektiv mitgeliefert bekommen haben, ging dies leider unter. Wir werden erst viel später bemerken, wie teuer uns diese Entscheidung zu stehen kommen wird.
Die wichtigen Faktoren nachdem das Objektiv ausgewählt werden sollte:
- horizontaler Öffnungswinkel für den Kamerasensor, viele Objektive passen auf unterschiedlich große Sensoren und die Eigenschaften verändern sich gravierend (90°+ aus Erfahrungswerten)
- Barrel Distortion sollte beachtet gehalten werden, da das Entzerren viel Rechenzeit in Anspruch nimmt und durch das Entzerren Pixel an den Rändern verloren gehen, womit der horizontale Öffnungswinkel effektiv kleiner wird
- das Resizen des Bildes für die Objekterkennung sollte auf der GPU umgesetzt werden, da es ein übliches Bottleneck darstellt
- passender Mount (C/CS) für die Kamera
- es sollte wasserdicht sein, da die FS Rules einen Regentest vorsehen
- automatische Blendeneinstellung, da es aufwendig ist, sie per Hand einzustellen
Damit sind wir mit unserer Auswahl der Hardware fertig. Nach der Requirementsanalyse der Software haben wir jeweils zwei vollständig redundante Umgebungsmodule verbaut, also zwei unabhängige Kameras und jeweils zwei Recheneinheiten.
Pipeline
Damit haben wir das Gesamtkonzept vom Fahrzeug für die Software und dessen Abhängigkeiten definiert und konnten uns an die Aufgabenaufteilung machen, zum Beispiel:
- Low-Voltage-Akku auf die Stromanforderungen auslegen
- Jetson TX2 in Betrieb nehmen
- CAN-Kommunikation
- Autostart von Scheduler bei Power On
- Softwaremodule schreiben und testen
- TCP/UDP Schnittstellen mit Simulationssoftware aufsetzen
- Latenztests
- Kamera in Betrieb nehmen
- C++ Interface testen
- USB-Kommunikation aufsetzen
- Standalone-Tests mit Laptop
- Einbindung in Darknet
- Definition von Integrationstests/SIL/HIL Reihenfolge
- Was ist unser MVP?
… und viele mehr. Die nächsten Schritte waren die Definitionen von Arbeitsblöcken, die jeweils in kleinere Arbeitspakete mit Zeitrahmen aufgeteilt werden. Diese können Personen zugewiesen werden und deren Fortschritt wird in wöchentlichen Treffen besprochen, um eine potenziell neue Priorisierungen zu schaffen.
Lessons learned
Wir haben vom Augsburger Team Starkstrom gehört, dass sie FPGAs benutzen, um Objekte mit Hough Transform zu erkennen. Damit schaffen sie mehr als 30 FPS.
Wir brauchen ein Kühlsystem für die Jetsons, wenn sie unter Volllast mehrere Stunden lang unter der prallen Sonne steht. Die Jetsonbox hatte nur Öffnungen für die Kabel und war tief im Inneren des Autos verbaut, wo sich die Hitze staute. Das Problem hat sich gezeigt, als sich die Jetson plötzlich neu gestartet hat.
Wenn die Distanzschätzung auf intrinsischen Parametern wie der Sensorgröße basiert, sollte man sich nicht auf das Datasheet der Kamera verlassen, sondern direkt das vom Sensor lesen. Selbst die zweite Nachkommastelle im µm Bereich hilft, Fehler zu beseitigen.
Die Objektiventscheidung muss gründlicher und in Kooperation mit der Kameraentscheidung durchgeführt werden. Man braucht mindestens einen horizontalen Öffnungswinkel von 90°, um Pylonen in Kurven mit einer Distanz von 6-10m zu erkennen.
ToDos for Season 2019
Es kommt eine neue Embedded-Recheneinheit von NVIDIA raus - die Jetson AGX Xavier. Diese ist deutlich mächtiger, verbraucht aber nur maximal 30W und kommt mit einem eigenem Converterboard. Das entkoppelt uns von der Abhängigkeit von Auvidea und sie kommt bereits mit einem eigenem Housing!
Da nun die Basis für die Monokularkamera langsam aufgebaut wurde, können wir uns auch nach anderen Themen umschauen, zu denen wir Fachwissen aufbauen wollen, um wissenschaftliche Vergleiche aufzusetzen. Im Fokus stehen dabei natürlich Stereokameras und LIDARs.
Ausblick
Im nächsten Teil der Blogserie widmen wir uns der Einbindung des neuronalen Netzes Darknet YOLO in die NVidia Jetson Architektur sowie dem Training und den Schritten, die nötig waren, um so ein Modell einzubinden und iterativ zu verbessern.
Noch Fragen?
Was bedeutet Machine Learning und wie kann Ihr Unternehmen vom Einsatz profitieren? Erfahren Sie, wie wir Sie beim Thema Machine Learning unterstützen können:
![]() Alexander Isenko - studierte Informatik im Master an der Ludwig-Maximilians-Universität in München und arbeitete als Werkstudent bei iteratec. Wir schätzen seinen Beitrag und informieren, dass er nicht mehr bei iteratec tätig ist.
Alexander Isenko - studierte Informatik im Master an der Ludwig-Maximilians-Universität in München und arbeitete als Werkstudent bei iteratec. Wir schätzen seinen Beitrag und informieren, dass er nicht mehr bei iteratec tätig ist.
Weitere Artikel








- Juli 2026
- Juni 2026
- April 2026
- Februar 2026
- Januar 2026
- Dezember 2025
- November 2025
- Oktober 2025
- August 2025
- Juli 2025
- Juni 2025
- Mai 2025
- April 2025
- März 2025
- Februar 2025
- Januar 2025
- Oktober 2024
- September 2024
- August 2024
- Juli 2024
- Juni 2024
- Mai 2024
- April 2024
- März 2024
- Februar 2024
- Januar 2024
- Dezember 2023
- November 2023
- September 2023
- August 2023
- Juli 2023
- Juni 2023
- Mai 2023
- April 2023
- Februar 2023
- Dezember 2022
- November 2022
- Mai 2022
- April 2022
- März 2022
- Januar 2022
- Dezember 2021
- November 2021
- Oktober 2021
- August 2021
- Juli 2021
- Juni 2021
- Mai 2021
- April 2021
- Dezember 2020
- Oktober 2020
- September 2020
iteratec
iteratec ist der Partner für alle, die zu den Gewinner:innen der digitalen Transformation gehören wollen. Mit individuellen, überlegenen Lösungen eröffnen wir unseren Kunden technologische wie unternehmerische Potenziale. Denn: Wenn Scheitern keine Option ist, sind wir der Partner, der den Unterschied macht. So haben wir seit 1996 mehr als 1.000 Projekte zum Erfolg geführt und eine Kundenzufriedenheit von 97%.